whatsapp: 0086-18615575385
Courriel: admin@sdafit.com


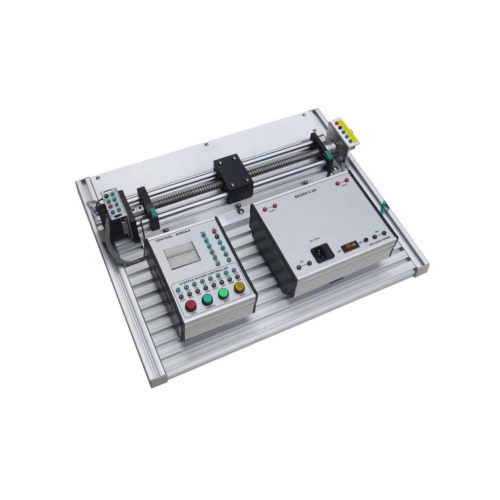
AF027E Laboratoire d'installation électrique d'équipement d'enseignement d'entraîneur de servomoteur à courant continu
1 aperçu du produit
1.1 Résumé
L'équipement de formation est une plate-forme de formation mécatronique complexe composée d'un coulisseau linéaire de servomoteur, d'un interrupteur électrique, d'un contrôleur de servomoteur et d'un module d'alimentation. Grâce à des expériences connexes, familiarisez-vous avec les caractéristiques d'exécution et de fonctionnement du système de commande de servomoteur, et cultivez les connaissances et les compétences techniques des étudiants, qui conviennent à des fins d'enseignement et de formation dans les écoles techniques, les écoles professionnelles et les collèges.
1.2 Caractéristiques
(1) L'établi d'entraînement adopte une plate-forme d'entraînement à plaque de base en alliage d'aluminium, avec pédale, et la structure inférieure est ferme. Le module d'actionneur est installé sur le substrat, ce qui est facile à utiliser et pas facile à endommager.
(2) Unité de contrôle en forme de boîte, l'alimentation électrique du contrôleur et les points d'entrée/sortie sont dirigés vers le panneau via la borne de sécurité, et la ligne de test K2 est connectée par l'expérience, qui est sûre et fiable.
(3) La combinaison organique de la technologie mécanique, de la technologie des capteurs et de la technologie de contrôle du mouvement des servomoteurs incarne les caractéristiques de la technologie de fabrication moderne. La structure globale est ouverte et amovible, et les modules peuvent être facilement remplacés. Le contenu des modules est déterminé selon le principe de la fonction de production et de la fonction d'apprentissage intégré, de sorte que les modules requis peuvent être facilement sélectionnés pour l'enseignement ou la compétition.
(4) Le dispositif de détection peut également être contrôlé par PLC et formé pour réaliser plusieurs modes de contrôle de l'apprentissage du servomoteur.
2 Paramètres de capacité
(1) Puissance d'entrée du système monophasé à trois fils : 220 v + 10 % soit 50 hz
(2) Taille : 500 mm × 450 mm × 180 mm
(3) Capacité de la machine< 1,0 KVA
(4) Poids < 100 kg
(5) Conditions de travail : température-10℃~+40℃ humidité relative<85%(25℃)

3 compositions de produits
3.1 Unité d'entrée de puissance
L'entrée d'alimentation est située dans le boîtier de commande du module de boîtier d'alimentation, connecté à une prise européenne et protégé par un fusible.
3.2 Modules de formation
Le module de formation adopte une base en aluminium avec des pieds réglables en caoutchouc au bas, qui est ferme et belle en structure.
3.3 Configuration de l'alimentation
(1) Entrée d'alimentation triphasée monophasée, contrôlée par fusible.
(2) Équipé d'un voyant d'alimentation.
3.4 Paramètres des composants
4 Caractéristiques du produit
1) Adoptez une puce DSP haute vitesse 32 bits.
2) Contrôle vectoriel orienté champ FOC, prenant en charge la boucle fermée de position/vitesse.
3) Le mode Position prend en charge l'impulsion de commande + la direction ou le signal d'impulsion orthogonal.
4) Le mode vitesse prend en charge le signal de cycle de service PWM ou le courant 4 ~ 20ma ou le contrôle du signal de pression électrique 0,6 ~ 3V.
5) 16 fonction de vitesse électronique, 1~65535/ 1~65535.
6)Tension d'alimentation +20V~50V. Prend en charge le servomoteur AC 50 ~ 500 W.
7) Prend en charge le mode de contrôle 485 (mode RTU du protocole modbus). Peut être réglé pour conduire
Adresse de l'appareil pour simplifier le système de contrôle. Il peut également être directement contrôlé par PC et fournir un logiciel de test PC Machine.
8) Avec protection contre les sous-tensions, les surtensions, le rotor bloqué et la surchauffe.
9) Fournir un signal en position de sortie isolé, un signal de sortie d'alarme, un signal zéro d'encodeur.
5 Contenu de formation pouvant être complété
(1) Expérience de modèle dynamique de servomoteur
(2) Expérience de mode de déclenchement unique du servomoteur
(3) Mode alternatif automatique du servomoteur
(4) Expérience de mode aller-retour unique de servomoteur
(5) Le servomoteur effectue l'expérience du mode de fonctionnement aller-retour en fonction du temps défini


















