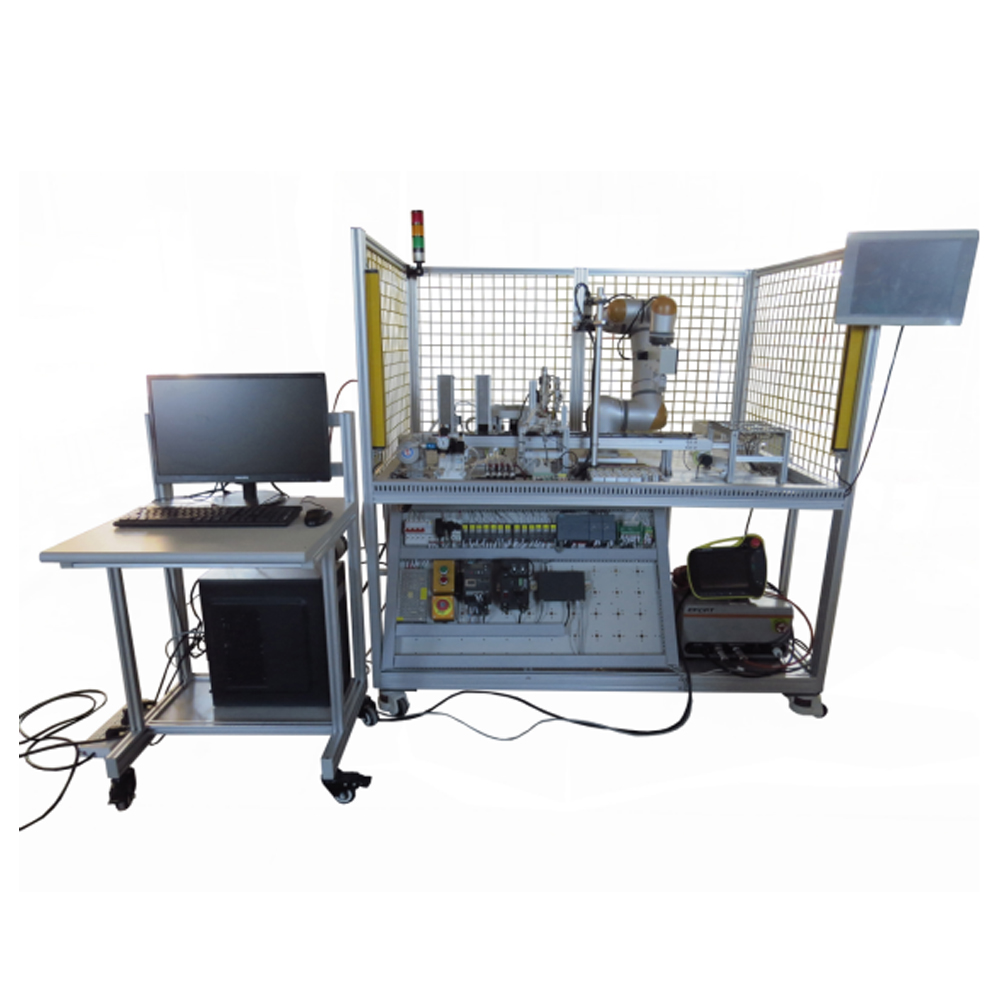
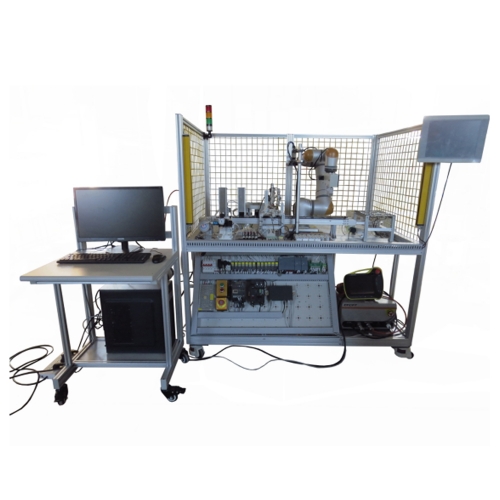
Bras de robot collaboratif à 6 axes avec caméra et pince Équipement de formation professionnelle Équipement de formation en mécatronique
No. d'article: AFM012R
Bras de robot collaboratif à 6 axes avec caméra et pince Équipement de formation professionnelle Équipement de formation en mécatronique