RT 060 Système de formation Régulation de position, HSI Matériel didactique Matériel de formation professionnelle Entraîneur de régulation de processus
Principes fondamentaux de la régulation à l'aide de l'exemple d'un système de régulation de position à comportement intégral
Caractéristiques
- relations de base de la régulation à l'aide de l'exemple d'un système à régulation de position
- contrôleur logiciel configurable et paramétrable avec fonctions étendues
- préparation d'expériences et simulation logicielle pour l'apprentissage à distance
- les expériences peuvent être suivies et analysées sur le réseau local
Objectifs d'apprentissage/expériences
- principes fondamentaux de la régulation à l'aide de l'exemple d'un système à régulation de position
- réponse en boucle de régulation ouverte
- système régulé sans rétroaction
- effets de différents paramètres et méthodes de régulation sur la réponse du système en boucle fermée
- optimisation du régulateur en modifiant les paramètres du régulateur : Kp, Tn, Tv
- enregistrement des réponses par échelon : échelon variable de manipulation et échelon de valeur de référence
- limitation variable de manipulation et effet sur le système de régulation
- simulation logicielle de différents systèmes régulé (P, I, PT1, PT2)
- comparaison de différents paramètres du système régulé
- logiciel spécifique pour l'ensemble série d'appareils
- contrôleur : manuel, fonctionnement manuel non contrôlé, régulateur continu, régulateur à deux ou trois points
- programmateur pour vos propres progressions de valeurs de référence
- enregistrement des dépendances temporelles
- apprentissage à distance : simulation logicielle sur un nombre quelconque de postes de travail
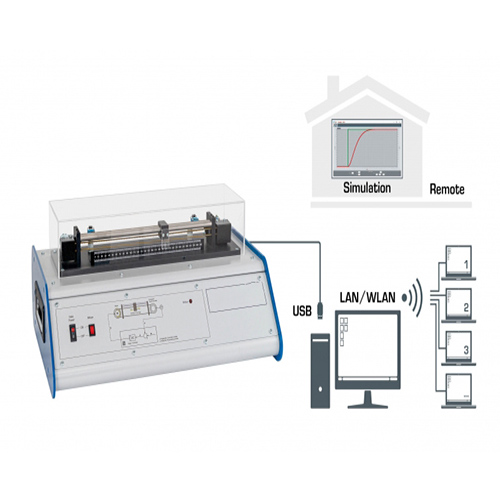
Spécification
[1] contrôle de position : système contrôlé typique
[2] système contrôlé : chariot mobile avec piste linéaire
[3] variable contrôlée : position du chariot mobile
[4] élément de mesure : encodeur rotatif (potentiomètre multitours) comme capteur de position
[5] le contrôleur logiciel peut être configuré et paramétré comme contrôleur P, PI, PID et de commutation
[6] actionneur : moteur


[7] échelle en acier pour l'observation de la position
[8] capot de protection transparent sur le montage expérimental
[9] 2 micro-interrupteurs pour la coupure de fin de course
[10] simulation logicielle : divers systèmes contrôlés
[11] logiciel : possibilité de connecter un nombre quelconque de postes de travail externes sur le réseau local pour suivre et analyser l'expérience
[12] préparation de l'expérience et simulation logicielle sur un nombre quelconque de postes de travail pour l'apprentissage à distance
[13] logiciel avec fonctions de commande et acquisition de données via USB sous Windows 10
[14] matériel didactique multimédia en ligne dans le Media Center
Données techniques
Moteur
- tension de service : 12VDC
- rapport de transmission : i=50
- vitesse : 85min-1
- couple : 200Nmm
Codeur rotatif : potentiomètre multitours
vitesse de déplacement max. : 45mm/s
Échelle en acier : 0...300mm
Contrôleur logiciel configurable et paramétrable comme régulateur P, PI, PID et de commutation
Plages de mesure
- course : max. 300mm
230V, 50Hz, monophasé
230V, 60Hz, monophasé
120V, 60Hz, monophasé
UL/CSA en option
LxlxH : 600x450x280mm
Poids : environ 20kg